

KDDI株式会社(本社:東京都千代田区、代表取締役社長 CEO:髙橋 誠、以下 KDDI)、アイサンテクノロジー株式会社(本社:愛知県名古屋市、代表取締役社長:加藤 淳、以下 アイサンテクノロジー)は2023年9月8日、長野県塩尻市の中山間地域で、多様な位置測位方式を連携させ、自動運転車からドローンが離着陸する物流実証(以下 本実証)に成功したことを発表しました。
本実証では、以下の異なる測位方式を、2社が開発した「協調制御プラットフォーム(注1)」(以下 本プラットフォーム)を活用することで連携可能にし、自動運転車とドローンがお互いの位置情報を把握して協調動作できることを確認しました。
| 自動運転車 | SLAM(Simultaneous Localization and Mapping):移動体の自己位置推定と環境地図作成を同時に行う技術 |
| ドローン | PPP-RTK(Precise Point Positioning RTK):PPP方式のカバー範囲の広さとRTK方式の測位精度の高さの両者のメリットを併せ持つ高精度位置測位技術(注2) |
2社は今後、労働力不足が顕在化する2030年を目途に、都市部からの大規模な配送は自動運転車、陸上からの輸送が困難な経路ではドローンで配送を行うといった全自動の荷物配送サービスの社会実装を目指します。
<本実証の様子>
なお、本実証はKDDIスマートドローン株式会社(本社:東京都港区、代表取締役社長:博野 雅文、以下 KDDIスマートドローン)、株式会社KDDI総合研究所(本社:埼玉県ふじみ野市、代表取締役所長:中村 元、KDDI総合研究所)および株式会社ティアフォー(本社:愛知県名古屋市、代表取締役社長:加藤 真平、以下 ティアフォー)の協力のもと実施されました。
スマートモビリティ同士の連携が重要な鍵
1.背景・課題
2030年の日本において、急速な人口減少に伴う労働力不足が課題となっています。特に中山間地域では公共交通機関の縮小や小売業者の減少などにより、日常生活を営む上で必要となる買い物が困難になる人の増加が予想されます。このような課題を解決する手段として、自動運転車やドローンなどのスマートモビリティの連携による自動配送の仕組みを構築することが重要となっています。
しかし、スマートモビリティはそれぞれの測位方式で動作しており、方式が異なるモビリティを連携するには各モビリティに専用の受信機を取り付けるなどのカスタマイズが必要なため、モビリティ連携の障壁となっています。そのため、モビリティを汎用的に統合管理可能な仕組みが必要とされています。
2.実証概要
2023年3月に日本で初めて、移動する自動運転車の位置に合わせてドローンが離着陸する実証に成功(注3)しました。本実証も同様に、荷物を載せたドローンが自動運転車上から飛び立ち、中山間地域を飛行したのち自動運転車上へ帰還するシナリオで実施されました。
前回(2023年3月)の実証では、PPP-RTK方式の高精度位置測位サービス(注2)に対応したドローンと同サービスに対応した受信機を取り付けた自動運転車で、位置情報を連携しました。
本実証では、自動運転車に受信機は取り付けず、本プラットフォームを活用することで、モビリティが持つ本来の測位方式(自動運転車:SLAM方式、ドローン:PPP-RTK方式)をそのまま使用できることが確認されました。これにより、各モビリティに対して機器設置などのカスタマイズの手間を削減することが可能です。
<実証に利用したスマートモビリティ>


自動運転車両(Autoware搭載JPN TAXI)※Autowareは、The Autoware Foundationの登録商標です。


ドローン(PD6B)

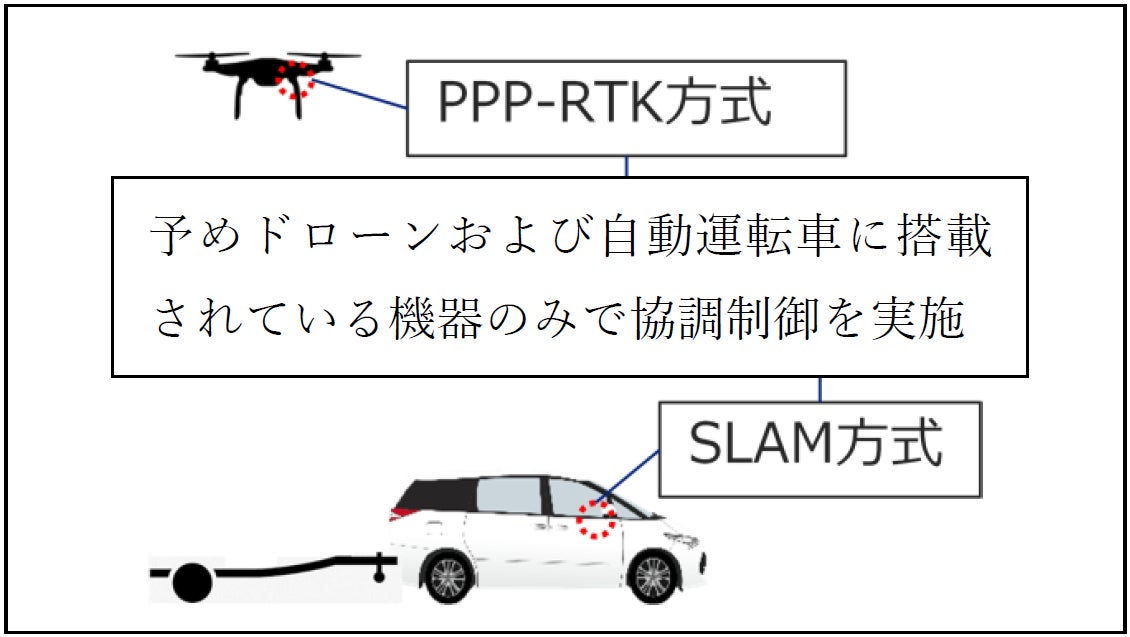
<異なる測位システムが連携する位置測位技術イメージ>
3.将来的な取り組み
今後、自動荷物配送サービスの社会実装に向けて、荷物配送計画から配送・帰還までをすべて自動で行えるよう本プラットフォームの機能を拡張していきます。
また、異なる測位方式を使用するスマートモビリティの協調制御に成功したことにより、本技術を応用することで、自動走行ロボットや水空合体ドローン(注4)などの多様なスマートモビリティ同士の連携が可能となりました。今後、多様なスマートモビリティを活用したユースケースも想定し、本プラットフォームの機能開発を推進していくと発表しました。
<測位システム方式別のスマートモビリティの例>
4.各者の役割
| KDDI | ・本研究開発の全体統括および統合実証主管 ・異なる測位方式の連携(座標変換システム)構築 ・ドローンと自動運転車の協調制御プラットフォームの開発 ・PPP-RTK方式の高精度位置測位サービスの提供 |
| アイサンテクノロジー | ・高精度3次元地図の製作 ・ドローンと自動運転車の協調制御のための位置座標補正システムの開発 ・自動運転車運行のための行政や関係者との調整、協議、許認可手続き |
| KDDIスマートドローン株式会社 | ・ドローン飛行のための行政や関係者との調整・協議・許認可手続き ・ドローン飛行システムの技術開発・提供 |
| 株式会社KDDI総合研究所 | ・衛星回線とセルラー回線のシームレスな切り替え手段の開発 |
| 株式会社ティアフォー | ・自動運転システムの技術開発・提供 |
なお、本実証は、国立研究開発法人情報通信研究機構(以下 NICT(エヌアイシーティー))から受託した「スマートモビリティプラットフォームの実現に向けたドローン・自動運転車の協調制御プラットフォームの研究開発 (採択番号:01601)」の一環として行われたものです。
(注1)2021年10月14日 ニュースリリース
Beyond 5G時代にヒトやモノへ最適な移動手段を提供するドローン・自動運転車の協調制御プラットフォームの研究開発に着手
~あらゆるモビリティがつながるBeyond 5Gネットワークを構築~
https://news.kddi.com/kddi/corporate/newsrelease/2021/10/14/5473.html
(注2)2021年7月19日 ニュースリリース
KDDIとSwift Navigation、移動に強い高精度位置測位サービスの提供にむけて業務提携契約を締結
https://news.kddi.com/kddi/corporate/newsrelease/2021/07/19/5262.html
(注3)2023年3月23日 ニュースリリース
自動運転車からドローンが離着するラストワンマイル物流実証に成功https://news.kddi.com/kddi/corporate/newsrelease/2023/03/23/6624.html
(注4)2021年12月14日 ニュースリリース
世界初の水空合体ドローン、遠隔での水中撮影に成功https://news.kddi.com/kddi/corporate/newsrelease/2021/12/14/5593.html